Research Areas
![]()
The research areas comprehend methodologies for the developement of high-end humanoid robots able to act in human centered environments and interact with humans in a natural and intuitive way. The research areas are
- Integrated Humanoid Platforms
- Interactive Learning and Exploration
- Multimodal Human-Robot Interaction
- Human Motion Analysis
- Grasping and Manipulation
Integrated Humanoid Platforms
The ARMAR series robots have been developed following an integrative and holistic approach to allow the realization of a wide variety of tasks in human-centered environments. Therefore, the ARMAR robots are equipped with sophisticated arm-hand systems for grasping and manipulation as well as an advanced head for visual perception and human-robot interaction. Research topics are related to the areas of lightweight construction, mechatronics, embedded systems, and control.



Interactive Learning
We address the question of how skill and task knowledge can be learned from human demonstration and how the learned knowledge can be refined using verbal-based instructions and teacher advice (gesture, speech) to be used in new situations and contexts.
Multimodal Human-Robot Interaction
For multimodal human-humanoid interaction, we are developing multimodal systems for spontaneous speech recognition, multimodal dialog processing, and visual perception of a user.
The systems allow the interactive learning of dialog strategies as well as of new words, persons and objects.

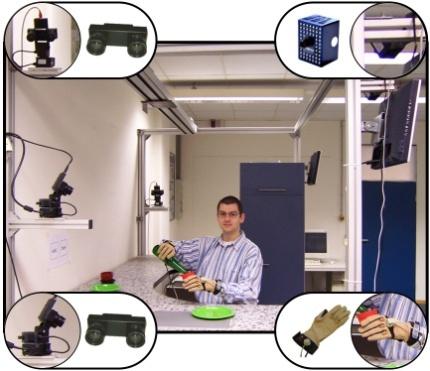
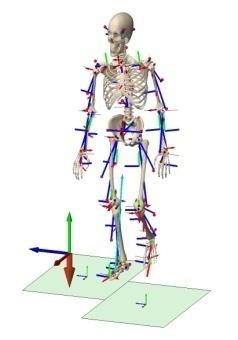
Human Motion Analysis
In this research area, we envisage research questions related to modeling of human motion, action grammars and action representations as well as biomechanical models of the human body. Of major interest are one- and two-handed grasping and manipulation tasks.

Grasping and Manipulation
The capability of grasping and manipulation is of utmost importance for robots which should be able to deal with a human-centered environment with the wide variety of objects and activities encountered in it.
We are investigating how grasping and manipulation tasks can be implemented in a reliable way leading to humanoid robots that are able to act and interact in the real world.
